
- キャッピングヘッド:サーボモーター駆動2個
- 電圧:220V、50/60HZ;
- 電力:3.0Kw
- 空気圧: 0.5~0.7Mpa
- アンペア: 8.5A
- 速度: 40〜45/分(瓶の形状とサイズに応じてカスタマイズ)
- 適合製品径:φ28~φ125mmの蓋(非標準カスタマイズ)
- グランド通過率: ≥99.5%(蓋とボトルの誤差による)
- 機械サイズ: 3300*1150mm*1908mm
- 重量: 450kg
機械の電源を入れる前に、安全事項と機械の正しい使用方法についてこのマニュアルをよくお読みください。人身事故を防ぎ、機械の損傷の頻度を減らすためです。
腐食性製品の場合は、腐食性物質が機械本体や作業員に触れたり、飛び散ったりしないように注意してください。
- 振動や衝突の可能性がある場所での機械の使用は避けてください。
- 機械が作動しているとき、スタッフの身体は可動部分に触れることができません。
- 安全事故を避けるために、本機は湿気の多い場所を避け、電源を入力し、アース線を正しく接地してください。
- オペレーターは正常な心身の状態を維持する必要があります。アルコール、睡眠薬、または精神状態に有害なその他の薬物を服用している場合は、機械の操作を中止してください。
- 作業者は、衣服が回転部品に巻き込まれることによる傷害を避けるために適切な衣服を着用する必要があり、機械の上に異物を置かないでください。
- 使用中に異音や異常が発生した場合は、直ちに使用を中止し点検してください。技術者以外の方は、機械部品を勝手に移動しないでください。
- 定期的な(1 回/週)メンテナンスとケアを行い、機械を清掃する際には、水や液体の飛散、電子制御ボックス、その他の電気部品の損傷を避けてください。
- 通常の操作手順に従って操作し、機械の表面を清潔に保ってください。
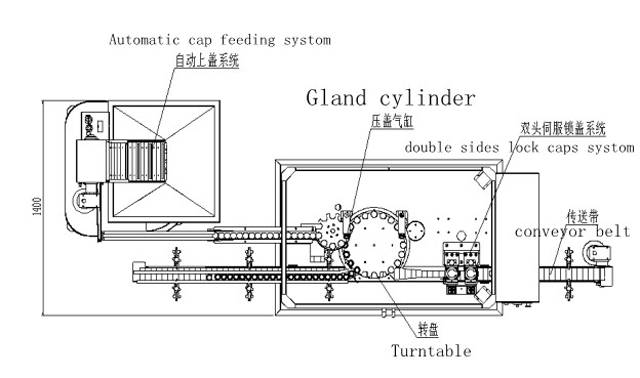
キャッパーマシンは、化粧品、医薬品、獣医薬、農薬、潤滑油、その他の産業分野の包装工程に幅広く応用されています。
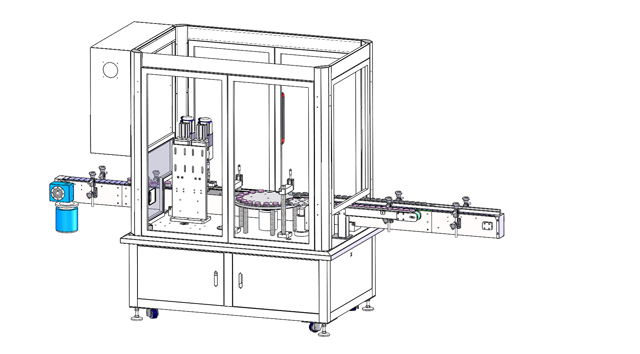


瓶キャッピングマシンの原理と特徴:
- 電気自動制御、安定しています。
- キャッピング位置決め装置、ロックカバー標準装備、操作が便利です。
- ロックカバーの範囲が広く、キャップの仕様に応じて様々な形状に回転できます。
- キャッピング速度、スピンの刑務所、同時に巻き戻しの締め付けも必要に応じて調整できます。
化粧品瓶キャッピングマシンの基本パラメータ:
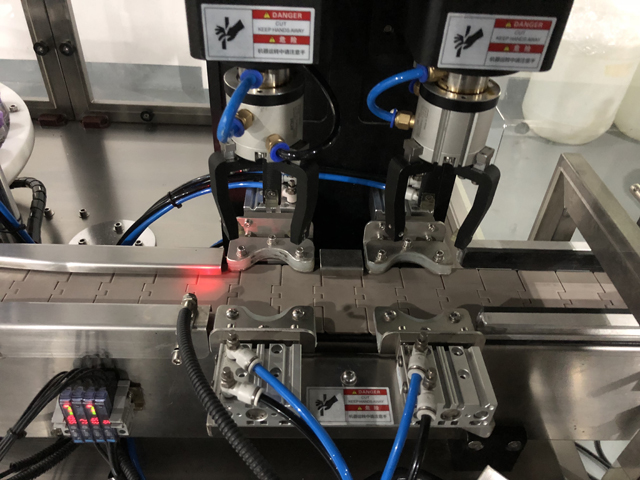
1. キャッピングヘッド:サーボモーター駆動2個
2. 電圧:220V、50/60HZ;
3. 電力: 3.0Kw
4. 空気圧:0.5~0.7Mpa
5. アンペア: 8.5A
6. 速度:40〜45/分(瓶の形状とサイズに応じてカスタマイズ)
7. 適合製品直径:φ28-φ125mmの蓋(非標準カスタマイズ)
8. グランド通過率:≥99.5%(蓋とボトルの誤差による)
9.機械サイズ:3300*1150mm*1908mm
10. 重量:450kg
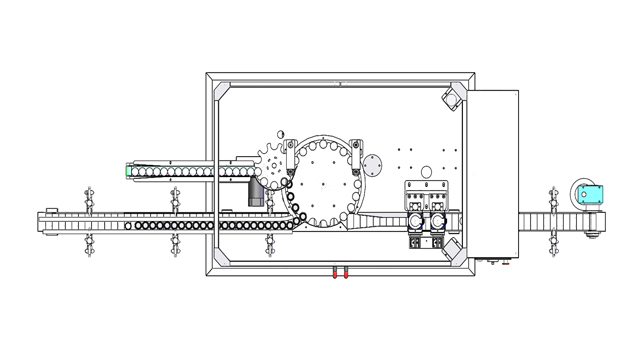
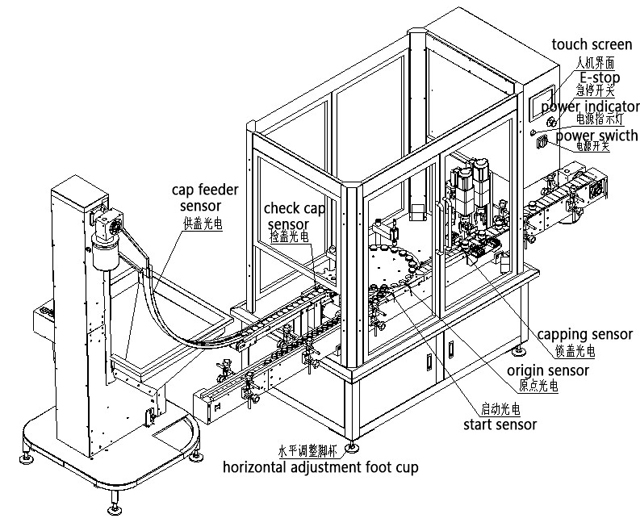
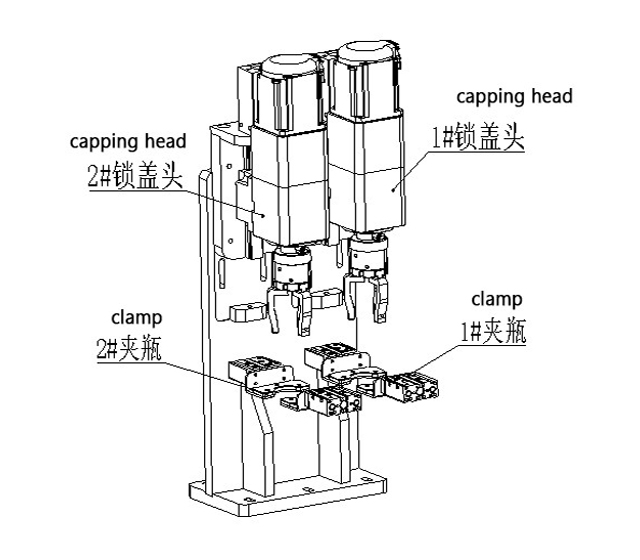
ホスト部品の説明
電源スイッチ:電源のオン---オフを制御します。
電源インジケータ: 電源オン---緑色のライトが点灯、電源オフ---緑色のライトが消灯。
緊急停止: 緊急時や障害時に機械を即時停止したり、機能をリセットしたりするために使用されます。
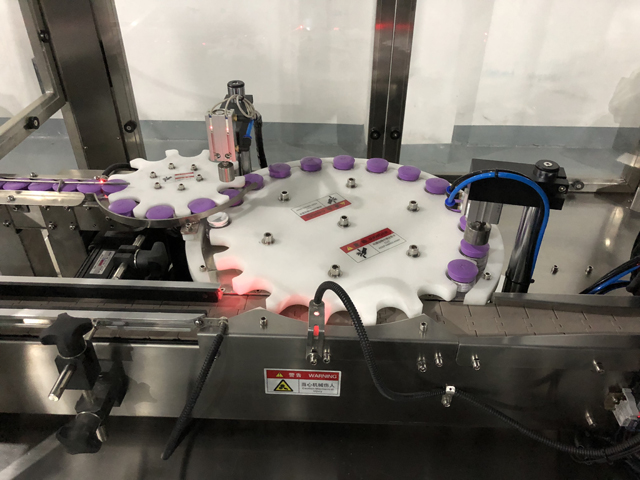
1. 光電を開始します。 機械が作動中、光電検出器がボトルがあり蓋があることを検出すると、ターンテーブルが作動を開始します。2 つの光電検出器のうち 1 つが検出されない場合、ターンテーブルは回転しません。
2. 起源光電: ボトルをスムーズにカバーに挿入できるように、ステッピングモーターを制御してターンテーブルの位置決めを駆動するために使用されます。
3. キャップ光電: カバーが所定の位置にあるかどうかを確認し、回転するカバーターンテーブルがあることを光電的に検出します。
4. カバー光電気: 上カバー機の起動と停止を制御し、上カバー機が提供するカバーが光電で検出された位置に仕分けされると、光電は常に明るくなり、カバー機はカバーのために停止し、インテリジェントカバーが実現されます。
5. ロックカバー光電: 蓋付きのボトルが通過すると、光電検出が検知され、設定された遅延時間に従ってロックカバーが作動します(機械の調整時にコンベアベルトの速度に応じて特定のパラメータが調整されます)。
6. ロックカバーシステム: 蓋付きのボトルも同様で、光電式の開始遅延、シリンダークランプボトルへの遅延、ロックキャップが下がり、グリップカバー-スクリューキャップ-グリッパーリリース-ロックキャップが上昇-クリップボトルが緩み、ロックキャッププロセスが完了します。ロックカバーでは、1#ロックカバーがロックカバー内にあるときに、別のボトルが入ります。このとき、2#クランプボトルシリンダーが移動し、2#ロックカバーがアクティブになってカバーをロックします。(2#ロックヘッドによってロックされたキャップが1#クリップボトルを通過すると、ロックカバーが繰り返されません。
マンマシンインターフェースの説明
ブートページ
3.1 起動ページには英語と中国語の操作選択があり、中国語ボタンを選択した場合は、次のインターフェイスに入ります:
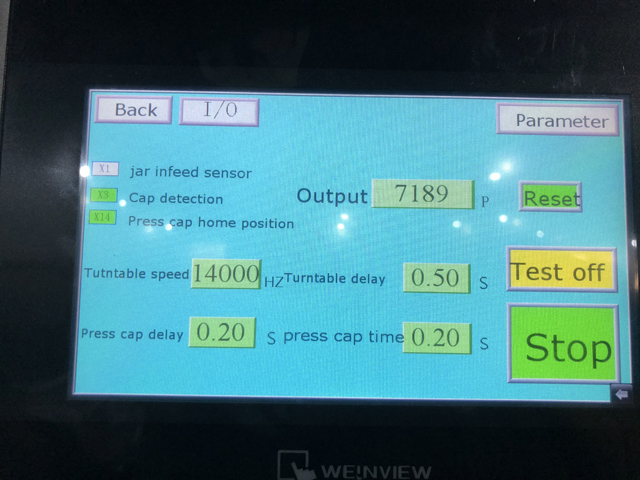
2番目のインターフェース
停止: 機械全体のスタートスイッチです。このキーをタッチすると、機械は自動モードで作動し、もう一度このキーをタッチすると、機械の作動が停止します。
テストゲート: 機械の動作をテストします。
ターンテーブル速度: 速度パラメータが大きいほど速度が速くなり、速度パラメータが小さいほど速度が遅くなります。(ただし、上限があります)。
ターンテーブル遅延: ターンテーブルの起動時間設定は、ターンテーブルの動作に合わせてスムーズに効果を設定します。
キャッピング遅延: ターンテーブルが指定の駅に到着した後、待機時間の間、シリンダーアクションキャップを遅らせます。
キャッピング時間: シリンダーを密閉するのに必要な時間。
出力: ロックカバーの数の記録を完了し、生産カウントに便利です。リセットキーを押してクリアします。
X1. X3. X14: 光電反射の動作状態を確認し、機械の動作状態を簡単に確認します。
キャッピングパラメータ: このキーを押して、次のインターフェースに入ります。
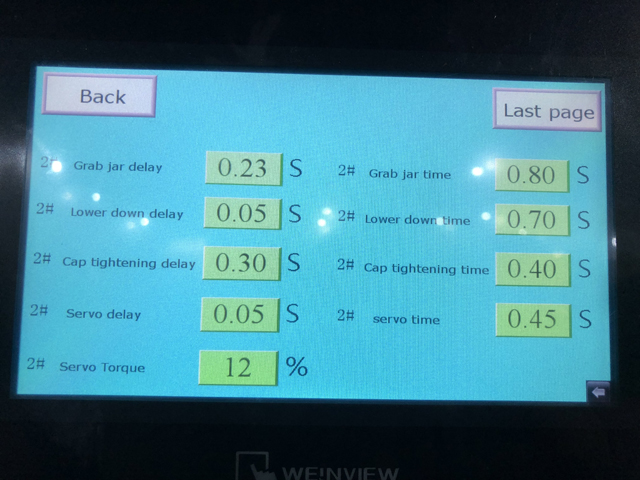
このインターフェースは、サーボロックカバーシステムの 1 # ロックヘッドの各動作に設定するパラメータページであり、パラメータの適切な設定は、マシンの安定性と効率の向上に役立ちます。
戻る: このボタンを押すと、2 番目のインターフェイスに戻ります。
入出力: このボタンを押すと次のインターフェースに入ります。
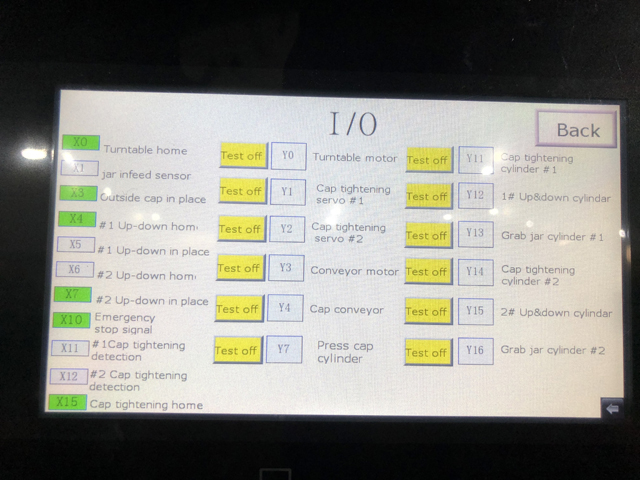
Xシリーズのポイント: 光電が動作状態にあるかどうかを検出する入力ポイントであり、機械の動作を簡単に確認でき、メンテナンスが容易です。
Yシリーズのポイント: 実行コンポーネントの正常状態をフィードバックする出力ポイントであり、手動でコントロールキーを押して実行コンポーネントが正常かどうかをテストすることもできます。
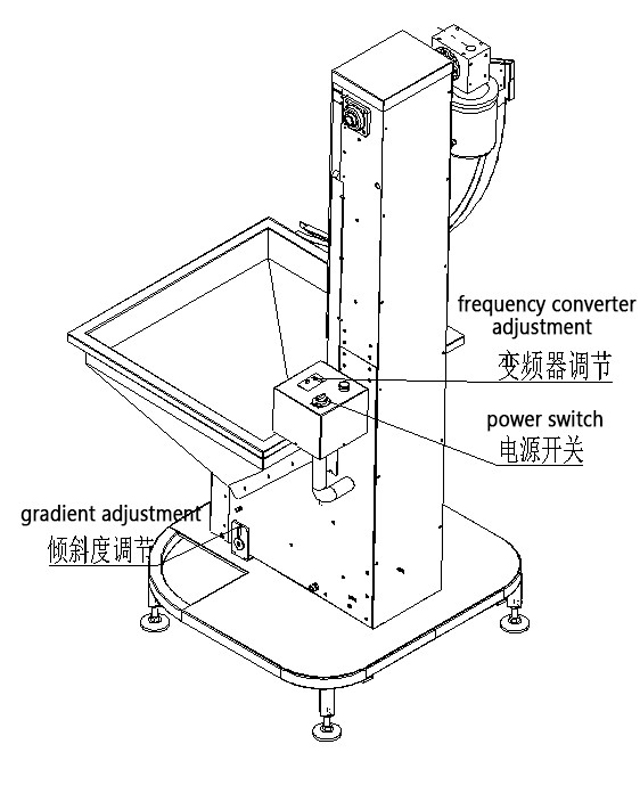
キャップフィーダーシステム: 規定の方向に沿って安定して整然と覆うことができます。
傾き調整: 適度な角度に調整でき、逆蓋がスライド内に入らないように制御できます。
周波数変換器の規制: カバーの速度を制御します。

瓶のキャッピング装置のメンテナンス:
1. 安全を確保するために、電源とガスを切った状態で機械を保守してください。機械を清潔に保ち、機械の上に雑品、小物、付属品、ボルトなどを置かないでください。
2. 機構の良好な動作状態を確保するために、可動部機構に潤滑油が定期的に追加されます。
3. シリンダーの適切な使用と耐用年数の延長を確保するために、エアフィルターユニットから定期的に水を排出し、潤滑油を補充してください。
4. 定期的に機械を点検し、修理してください。機械が正常に作動していることを確認するために、目と耳で機器の稼働状態を判断してください。
注記: 取扱説明書に厳密に従って使用および保守してください。保証期間中は、分解および開封は固く禁じられています。分解および開封による損傷は人的損害とみなされ、無償修理は行われません。この説明書は予告なく変更される場合があります。この機械の操作について不明な点がある場合は、いつでもお問い合わせください。
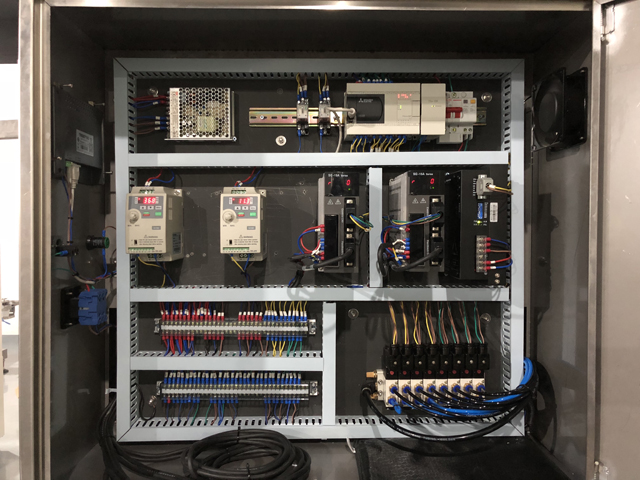
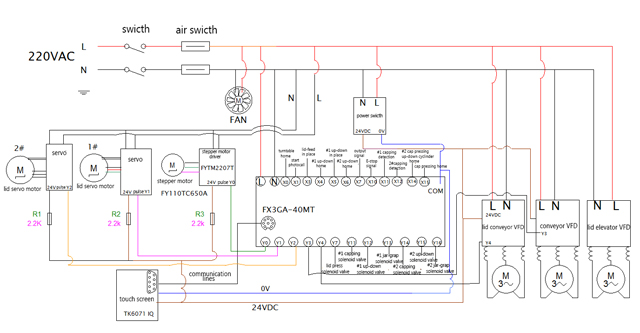
添付の電気回路図:
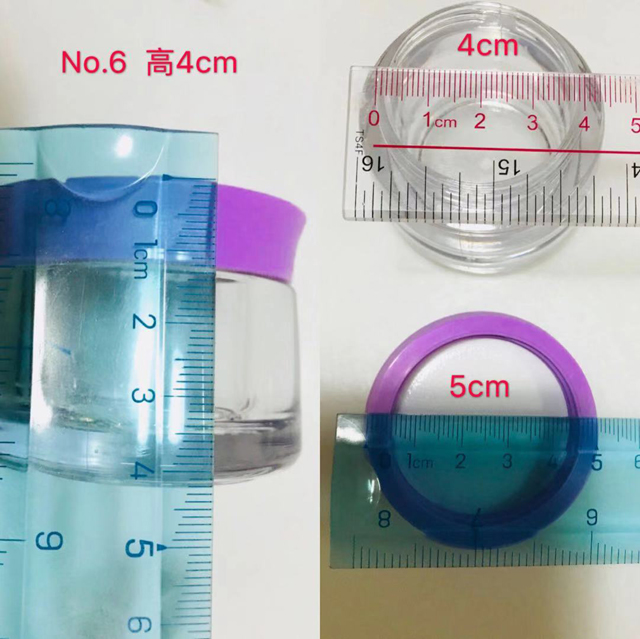
完成した密封キャップのサンプルは、瓶のキャッピング マシンで処理されます。




マーク: 四角い黒い瓶の場合、キャップが傷つきやすいため、ピックアップシステムが設計されており、瓶のキャップをトレイから引き出し、キャップを閉めるプロセスのためにキャップ準備ステーションに置きます。詳細な動作原理は、次のとおりです。動作プロセス:
1. キャップをトレイ(15×15または10×10)に手動で入れる

2. トレイをピックアップステーションに置く
3. 瓶を拾うロボット
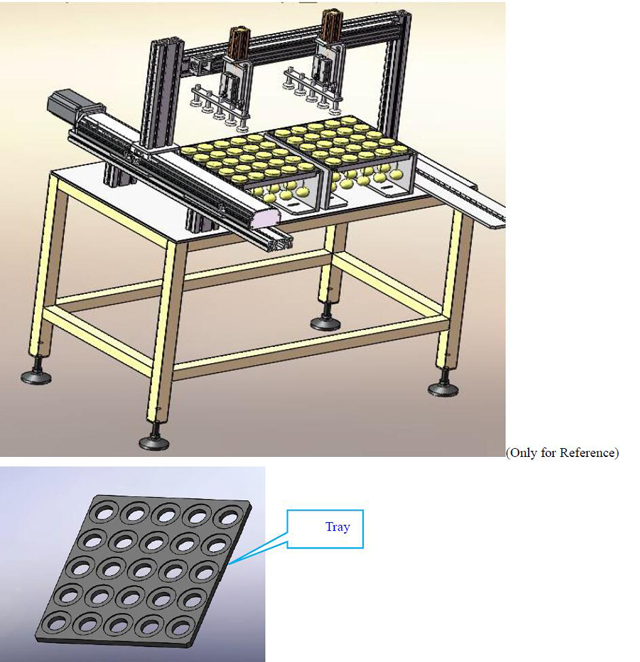
4. ボトルの位置決めとキャップの工程終了
5. キャップ付き瓶の出力











