
- 材質: ステンレス
- キャッピングヘッド: 1
- 密封缶の数: 1
- シール速度: 1分あたり25〜30回
- シールの高さ: 40-200mm
- 使用可能なボトルの直径: 35-100mm
- 動作圧力: Ac220v 50/60hz(Ac380v 50/60hz)
- 電力: 1.1kw
- 重量: 500kg
- サイズ: 3000*900*1700mm
- 空気源: 0.5mpa
この製品は主に、PET プラスチック、鉄、アルミニウム、紙などのさまざまな品質の丸缶の密封包装に適用され、先進的な設計と操作しやすい合理的な構造を備えており、食品、医薬品、お茶、化学工学などの業界に必要な理想的な包装機器です。
この製品の本体はすべてステンレス素材を採用しており、シンプルで美しい外観を持ち、ほとんどの標準生産部門の設計要件に準拠しています。
この製品は単相または三相電源を採用しており、その出力は1.1kwに達します。そのさまざまな部品とコンポーネントは精密機械加工されており、生産技術などは当社の長年の顧客経験を通じて促進され、継続的に改善されており、主要部品は高強度、低騒音、優れた密閉性能を備えた独自の設計を採用しています。
この製品はすべて国家規格、部門規格、企業規格の規制に準拠しており、厳格な検査とテストに合格した後にのみ工場を出荷されます。
充填システム、計量充填システム、ラベリングシステムを備えた生産ラインを構成できる全自動生産ライン設計です。

性能仕様
1. シーリングには 4 つのシーリングホイールが採用されており、そのうち 2 つはヘミング用、もう 2 つはブランクプレス用で、原理が簡単で調整が簡単です。
2. 最新世代の機械設計を採用し、缶本体は密封の過程で回転せず、密封ホブナイフが回転して密封を完了します。信頼性が高く安全で、壊れやすい製品や液体製品の密封包装に適しています。
3.ホブナイフの動作とナイフレストの上昇は機械カムによって制御され、安定した信頼性の高い動作を実現します。
4. ホブナイフは304ステンレス鋼で製造されており、耐久性があり、密閉性能に優れています。
5. 操作インターフェースは非常にシンプルで、操作が容易です。
主な特徴
1. 最新世代の缶シーマーであり、最も重要な特徴は、缶詰中に缶本体が回転せず、缶内の製品がずれて落ちるのを防ぐことです。
2. 操作インターフェースはシンプルで合理的なデザインです。
3. 加工精度が高く、本体はオールステンレス製で、生産部門の設計要件に適合しています。
4. 充填、ラベリング、コードスプレー設備などを備えた生産ラインを構成でき、生産効率が高くなります。
5. 下部カバーを自動的に検出でき、回路制御設計が合理的です。
6. すべての部品、コンポーネント、電気アクセサリなどは、信頼性と安定した品質を備えた国内の有名工場の製品を採用しています。
技術的パラメータ
- 材質:ステンレス
- キャッピングヘッド: 1
- 密封缶の数:1
- シール速度:毎分25〜30回
- シールの高さ:40〜200mm
- 使用可能なボトルの直径:35〜100mm
- 使用圧力:AC220V 50/60Hz(AC380V 50/60Hz)
- 電力: 1.1KW
- 重量: 500KG
- サイズ: 3000*900*1700mm
- 空気源:0.5MPa
操作パネル
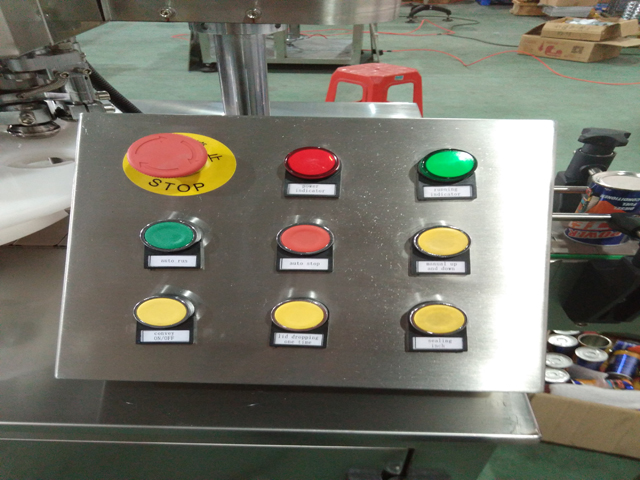
1. 電源インジケータ(赤色の表示灯):赤色の表示灯が点灯している場合は、機器の電源がオンになっていることを示し、その逆も同様です。
2. 動作インジケータ(緑色の表示灯):緑色の表示灯が点灯している場合は機器が動作中であることを示し、点灯していない場合は動作中であることを示します。
3. 緊急停止: 緊急の場合は、このボタンを押すと機器がすぐに停止し、他のスイッチは機能しません。キャンセルする場合は、ボタンを十字に回すと自動的にポップアップし、機能が回復します。
4. 操作/オン(緑色のボタン):このボタンを押すと、機器が作動を開始します。
5. 操作/オフ(赤いボタン):このボタンを押すと、機器は動作を停止します。
インチング(黄色のボタン):このスイッチは主に機器のデバッグに使用され、ボタンを押すと機器が作動し、その逆も同様です。
装置の原理と設置方法
1. 機器の動的設計の原則
この設備は2値電気容量の非同期モーターを採用し、モーター出力は1.1KW、回転速度は1400r/minです。三角ベルトホイール、歯車、タービンなどのリンクギアは40r/minに減速し、タービンは昇降カムの作用で円回転して上下のプロセスを完了し、同時に第1および第2のローリングシールホイールをそれぞれ駆動して、2組の歯車の速度差の下でカムと協調し、1缶のロールシールの全プロセスを完了します。
2. 機器のシール設計の原理
この装置は、二重シームの原理を採用し、カバー側と缶側の閉塞、折り畳み、押し下げの手順を利用して、密封効果を実現します。手順は次のとおりです。
(1)缶キャップを缶の上に置き、缶の縁が缶キャップの縁の内側の開口部に沿うように傾くようにします。
(2)リフターの圧力を利用して缶本体を持ち上げ、缶キャップをドッグに押し付けます。
(3)第1ロールはキャップの縁を内側に包み込み、一方のロールはキャップの縁の周りを回転し、もう一方のロールは軸に圧力をかける。
(4)第1ロールが動作を完了した後、第2ロールは、第1ロールから形成された第1丸い継ぎ目を第2丸い継ぎ目にしっかりと押し付け続け、ロールシールが完了する。
(5)リフターを逆さまにして、ドッグを下向きに押して空き缶から出します。
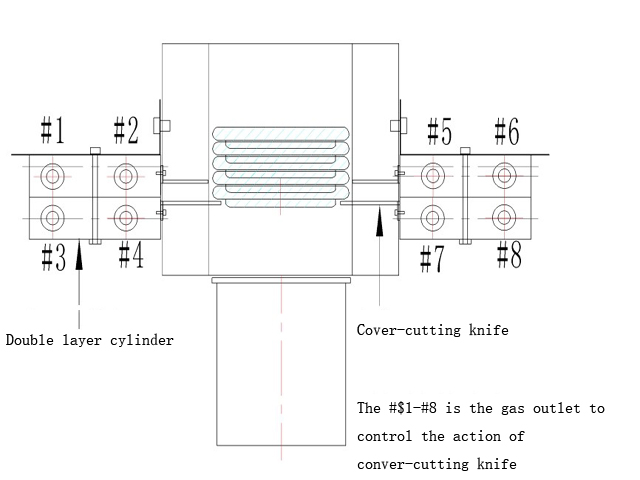
3. 自動カバー降下原理
この装置は自動フォトアイ検査装置を備えており、缶が所定の位置に到達した後、フォトアイは検査信号をマスター制御回路に送信し、マスター制御回路は設計に従って関連信号をカバー降ろし装置に送信して関連動作を制御し、自動カバー降ろし機能を実行します。 自動カバー降ろし装置の物理的な構造とその原理は、次の図に示されています。

マシンを段階的にインストールするにはどうすればいいですか?
最初のステップ:コンベアチェーンを設置し、設置後に直線性があり、適切な締め付けがされているかどうかを確認します。
2番目のステップ:コンベアレールを設置し、ポップ缶をスムーズに搬送できるように調整します。
最後に、機器の電源を入れ、通風した後、操作できるようになります。
 | 各セクションのチェーンはピンで接続され固定されています(時計のチェーンに似ています) |
 | コンベアは基地を横切る |
 | コンベアの各セクションのチェーンボードはピンで接続されています |
 | ネジを調整してコンベアを締めたり緩めたりすることができます |
 | ピンで接続した後、しっかりと打ち付けます |
 | コンベアとメイン機器は2本のネジで接続され固定されています |
 | コンベアレールの設置 |
 | レールの設置と固定装置 |
 | コンベアモーターの電源をオンにします(U1およびU2端子に接続します) |
各電気部品の位置の概要:
1. 吸気スイッチの接続方法は次のとおりです。

2. コンベアモーターの配線方法は次のとおりです。

缶シール機の詳細なマニュアルブックの詳細については、メールでお問い合わせください。
缶の密封サンプル











